
Nowy model sztucznej inteligencji jest w stanie antycypować ruchy pieszych w czasie rzeczywistym. Uzyskuje on wyniki lepsze niż istniejące systemy, torując drogę dla bezpieczniejszych pojazdów autonomicznych – doniesiono w magazynie „Computers & Electrical Engineering”.

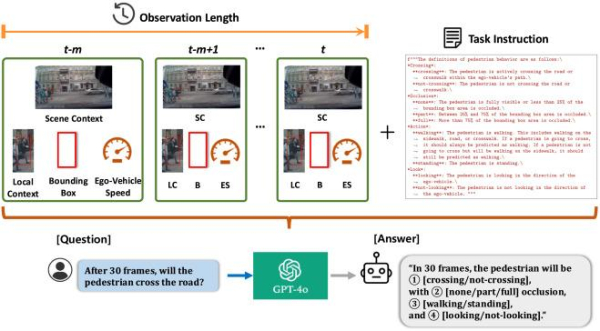
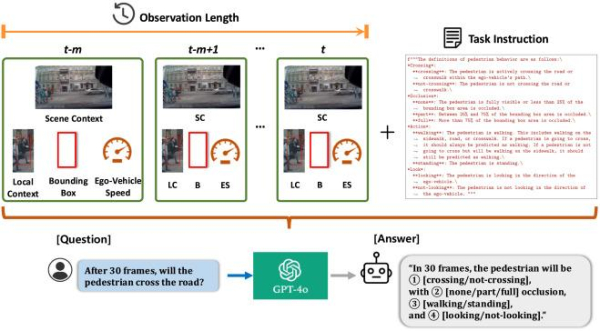
Uczeni z Texas A&M University oraz Korea Advanced Institute of Science and Technology opracowali system OmniPredict. Analizuje on dane wizualne z kamer drogowych oraz informacje dotyczące sytuacji na drodze, by prognozować zachowania pieszych. Nie tylko identyfikuje obiekty, ale łączy bodźce wizualne z kontekstem otoczenia – rytmem ruchu, kierunkiem spojrzenia i zmianami w postawie – a następnie przewiduje prawdopodobne działania ludzi w nadchodzących sekundach.
Według szefa zespołu badawczego, dr. Srinkantha Saripalliego, obecne systemy tego typu, używane np. w samochodach autonomicznych, dobrze radzą sobie z analizą obrazów, ale mają trudności z nieprzewidywalnością miejskich ulic.
– Zmiany warunków pogodowych, niespodziewane reakcje ludzi, wyjątkowe sytuacje oraz ogólny chaos na ulicach miast – wszystko to może negatywnie wpłynąć na nawet najbardziej zaawansowane systemy wizyjne – powiedział Saripalli.
OmniPredict ma za zadanie niwelować te niedogodności, ponieważ reaguje nie tylko na zaistniałe zdarzenia, ale również na te, które mogą nastąpić. Takie podejście może redukować liczbę sytuacji konfliktowych na drodze i zwiększać płynność ruchu.
Texas A&M
Jak zaznaczyli badacze, ich model może być również wykorzystany poza transportem cywilnym. Zdolność oceny postawy oraz oznak wahania i stresu jest wartościowa dla służb wojskowych i ratowniczych, umożliwiając szybszą identyfikację potencjalnych niebezpieczeństw. Podkreślili, że system ma służyć jako wsparcie w podejmowaniu decyzji przez człowieka, a nie go zastępować.
W testach, które symulowały złożone sytuacje drogowe, w tym scenariusze z częściowo zasłoniętymi pieszymi, osobami poruszającymi się w nietypowy sposób lub gwałtownie skręcającymi w stronę pojazdu, system prognozował zachowania ludzi z efektywnością około 67%, co jest znacznie lepsze niż w przypadku dotychczasowych rozwiązań. Według uczonych, ta różnica w szybkości reakcji i adaptacji do zmiennych warunków jest istotna w ruchu miejskim.
Mimo że OmniPredict jest na razie projektem badawczym, jego twórcy zaznaczają, że to właśnie tak powinny wyglądać przyszłe technologie dla pojazdów autonomicznych.


Dr Srinkanth Saripalli wraz z zespołem (Texas A&M)
– Ten system otwiera możliwości bezpieczniejszego działania pojazdów autonomicznych, redukcji liczby wypadków z udziałem pieszych oraz transformacji od reagowania na niebezpieczeństwa do aktywnego im zapobiegania – skonkludował Saripalli.
Katarzyna Czechowicz (PAP)
kap/ zan/